「自動運転」と聞くと車をイメージすることが多いですが、久留米工業大学の東教授はWHILL Model CRを活用し、対話を通じて自動運転ができる車椅子の研究を行なっておられます。その背景、目指す未来とは?東教授にお話を伺いました。

東 大輔 教授
(久留米工業大学 インテリジェント・モビリティ研究所 所長)
1. 研究内容
久留米工業大学は私を含めメーカーで新車開発を経験した教員が多く、その強みを活かして、知性(インテリジェンス)があり、単なる移動手段ではないパートナーのようなモビリティを研究する「インテリジェント・モビリティ研究所」を平成27年に設立しました。本学は「人間味豊かな産業人の育成」を建学の精神としており、工学の力で体の不自由な方の移動をサポートしたいと思い、対話で行先を相談できる自動運転車椅子”パートナー・モビリティ”の研究を進めています。この”パートナー・モビリティ”を通して、社会に新たな価値を提案していきたいと考えています。
2. WHILL Model CR導入の背景
当初は、自動運転システムを自動車やドローンに応用することを想定していました。しかし、久留米市内の介護福祉団体の方々とお話をする中で、介護の現場でも自動運転技術が大きく期待されていることを知り、車椅子の自動運転に着手しました。また、介護の現場では人手不足が深刻で、介助者の負担軽減が喫緊の課題であることも知り、自動運転や人工知能といった先進モビリティ技術で、介護を必要とする人だけでなく、介護を行う人、さらにすべての人がいきいきと暮らせる社会を実現したいと強く思うようになりました。
車椅子に「自動運転」と「対話」という機能を付加すれば、多様な方々の外出や社会参画をサポートできると考えています。すべての人がショッピングや観光を自由に楽しみ、能力を発揮して社会に貢献し、心から生きがいを感じて笑顔になれる社会を実現したいと考えています。さらに、自動運転で安全な移動を実現することで、ご家族や介助者の「安心安全に過ごしてほしい」という思いも叶えたいと考えています。
自動運転
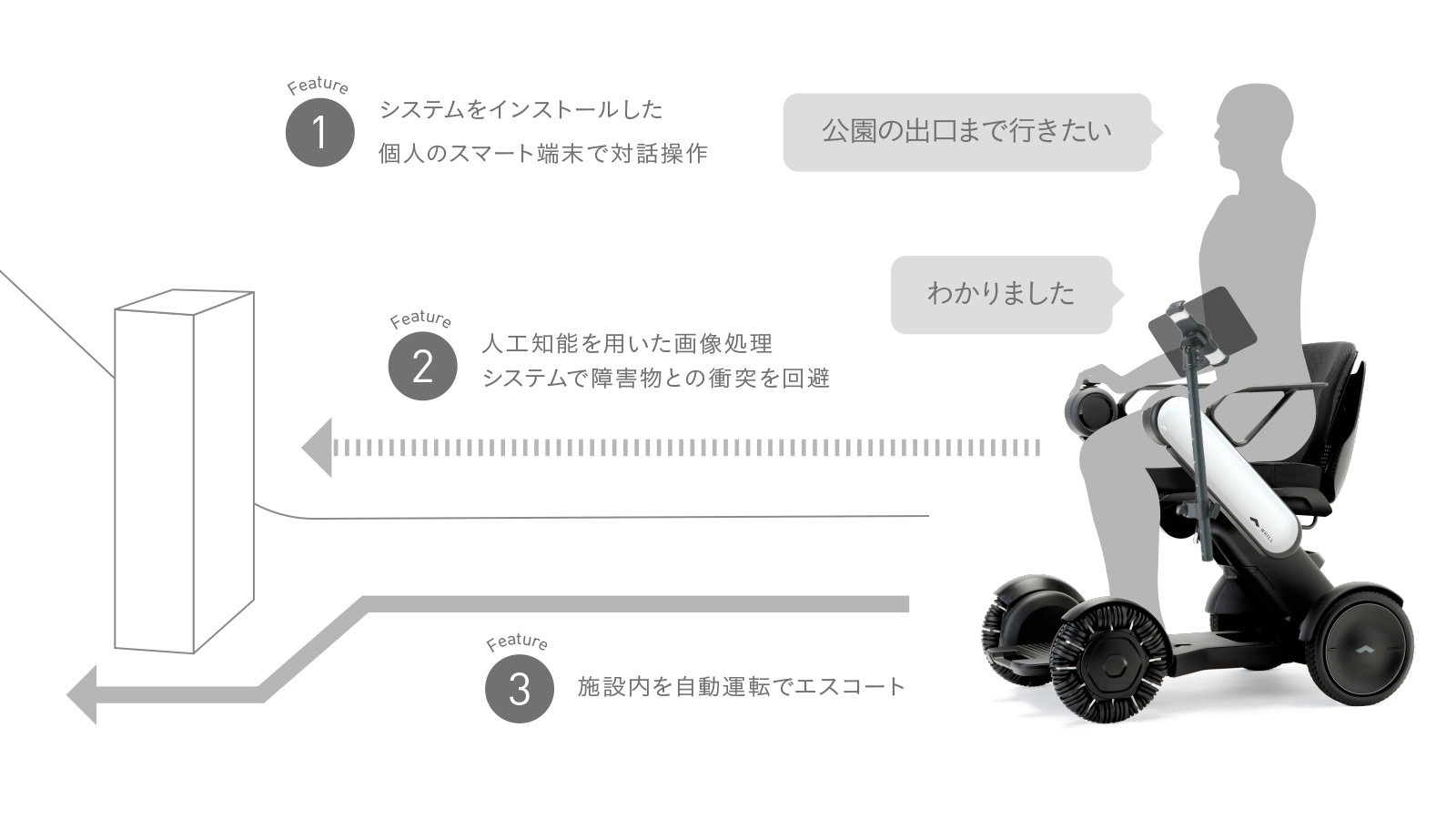
準天頂衛星「みちびき」による自己位置同定システム、カメラによる画像診断、LiDARによるエリアマップ作成と自己位置同定システムを組み合わせ、屋内外に対応可能な自動運転システムを実現しています。このシステムを組み込んだPCをWHILL Model CRに接続しています。
あわせて、カメラ画像からAI(人工知能)が走行中の障害物を検知・判断することで、危険回避も可能にしています。今後も、利用シーンに特化した人工知能の学習を強化していきます。
対話
AI(人工知能)が、対話を通じてユーザーの好みに合わせた行き先と、最適ルートを提案します。このシステムはWEB上に存在し、ユーザーの端末(スマートフォン、タブレット)を介して、WHILL Model CRと接続しています。
今後は介護現場に特化した対話内容のストックとディープラーニングによる分析を進め、協力企業であるコンピューター・サイエンス研究所様、ゼンリンデータコム様と協力して対話の判断ミスを低減する自然言語処理エンジンの開発を進めます。

3. WHILL Model CRを選んだ決め手
研究を行う上で、ソフトの開発を行うことはもちろん、プラットフォームとなるモビリティも重要でした。そこで、さまざまな種類の車椅子を試しました。
優れたデザイン性
私たちが必要としていた車椅子の条件は、まず何より「かっこいい」ことです。当然のことですが、年齢や身体の状態に関わらず、誰もが「かっこよく生活を楽しみたい」という想いを持っています。安心や利便性のためにかっこよさを我慢するのではなく、機能性とデザイン性が両立するモビリティにすることで、「外出したい」と思えるものにしたいと考えました。福祉用具は機能性に焦点が当てられることが多いですが、WHILLのデザインはすべての人が魅力を感じる、本当に素晴らしいものだと思います。
走行時の安定性、段差乗り越え性能
もちろん、走行安定性と力強く段差を乗り越える能力も重要です。WHILL Model CRの走行安定性は抜群で、荒れた路面や傾斜の付いた場所でも安心して走行することができます。また、5cm程度の段差なら難なく越えられます。WHILL Model CRであれば、自動運転でも乗っている人が安心できると感じました。
方向転換のスムーズさ
オムニホイールを搭載していることで非常にスムーズな旋回が実現できます。自動運転を行う際、モビリティの動きがカクカクとした、連続性のない動きになりがちなのですが、WHILL Model CRは制御に対する応答性が高く、スムーズに走行できます。これも利用者に安全と安心を提供する重要なポイントだと感じています。
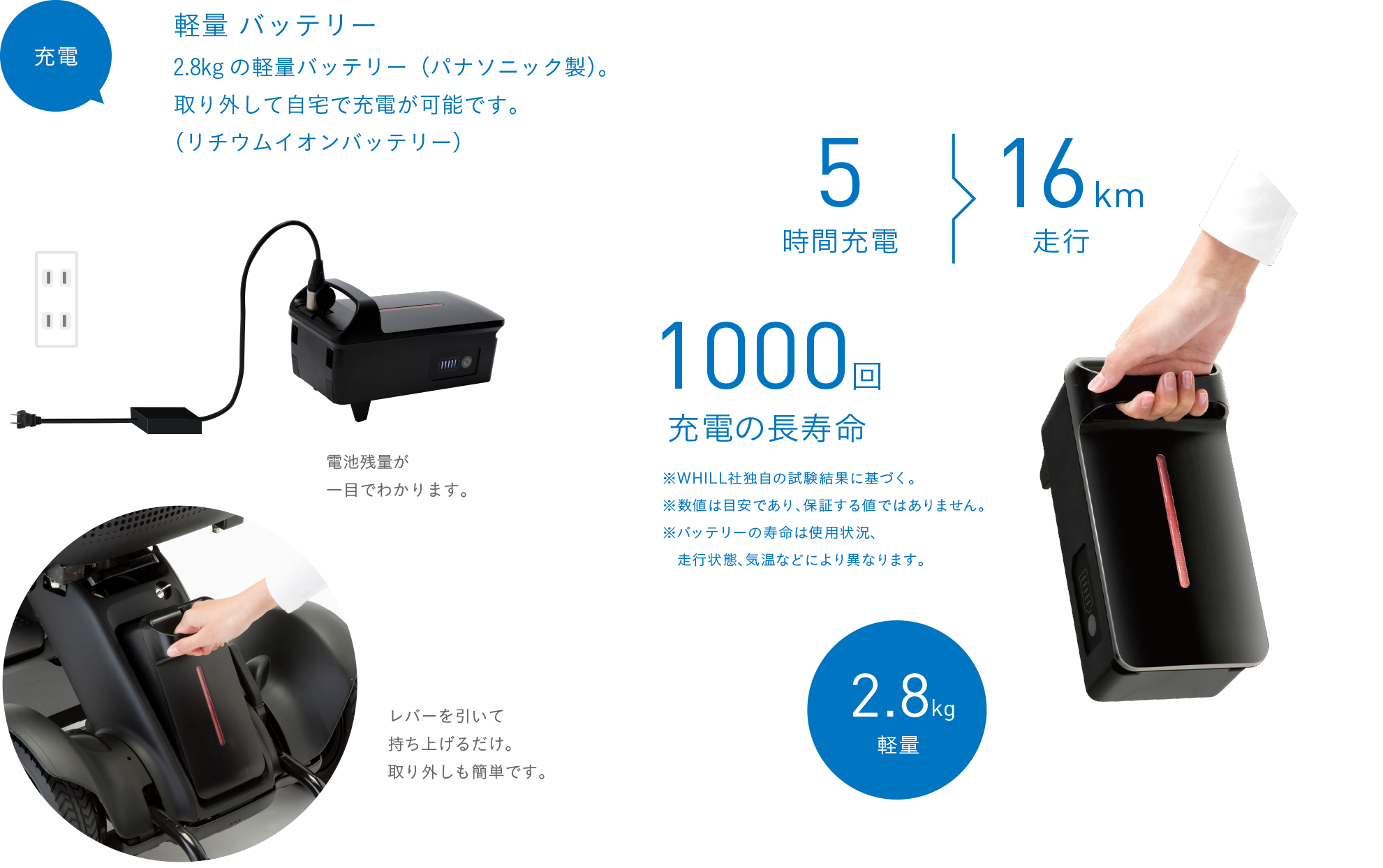
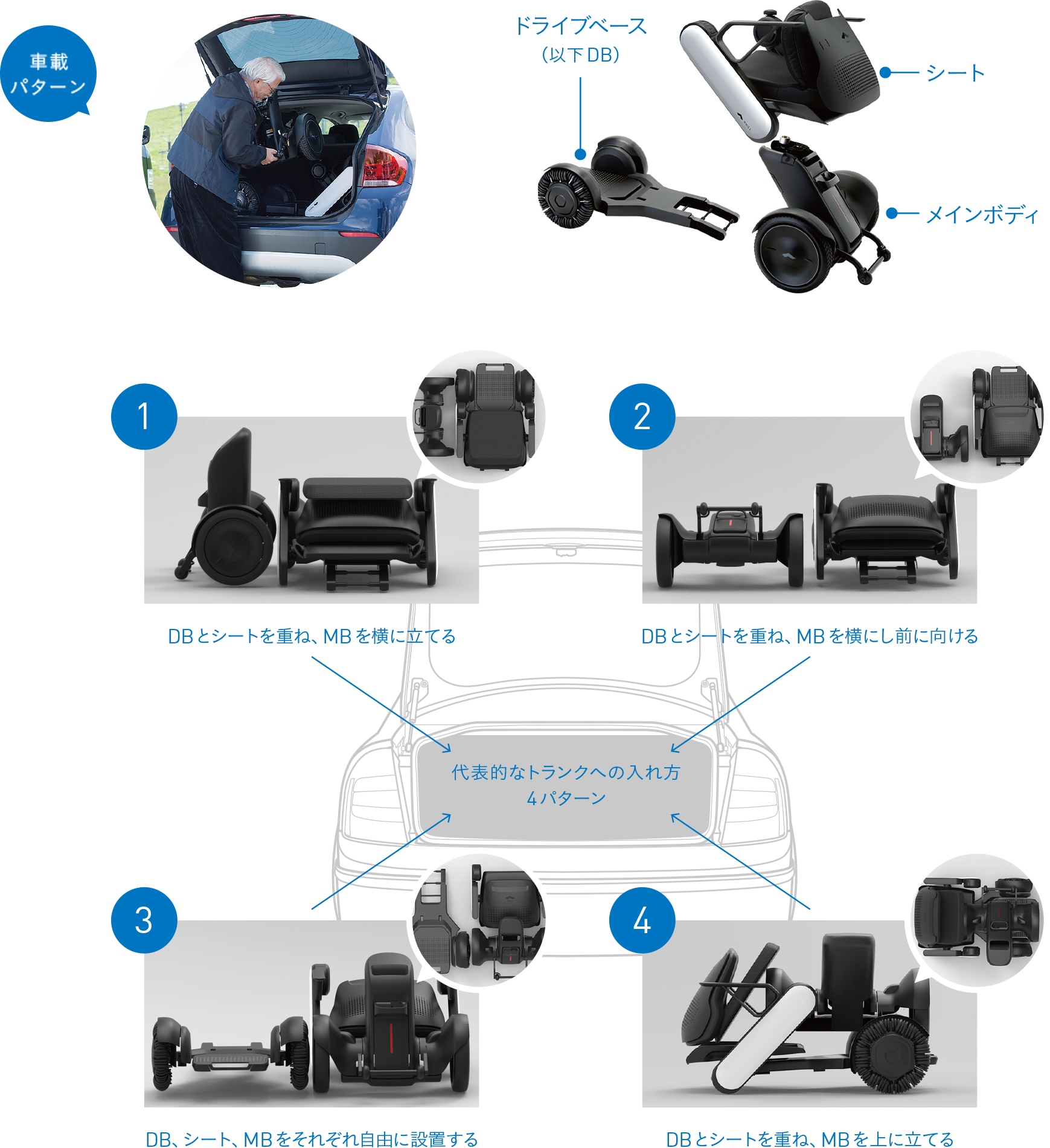
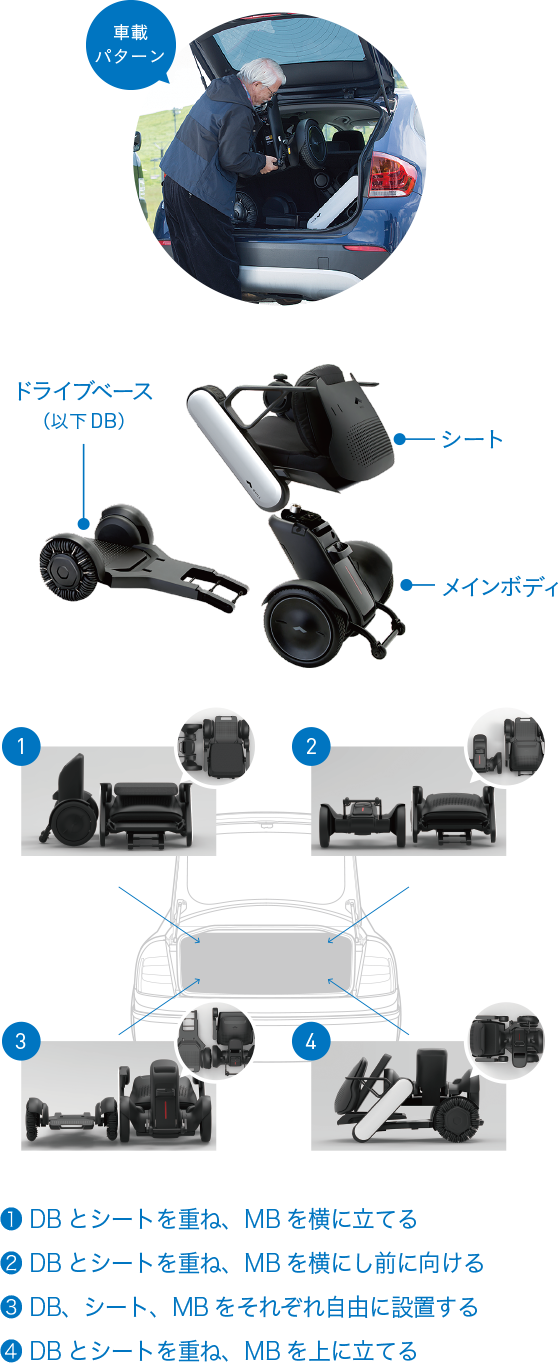
持ち運びのしやすさ
公道での実証実験や、展示会でのデモ走行の際、分解して普通乗用車に車載できることは非常に便利です。例えば、ハンドル型の電動カートを持ち出すには、車載するための大型車両とスロープが必要となり、また運転者が限られる場合があります。WHILL Model CRはその必要がないため、セダンやコンパクトタイプの普通乗用車でも持ち出して実験することができます。移動にかかる労力や費用もかなり抑えられ、とても助かっています。バッテリーの持ちが長いのも嬉しいです。
4. 今後の展望
すべての人が安心安全に自由に移動を楽しめる。そして、それぞれの能力を発揮して社会に貢献し、いきいきと笑顔で暮らせる社会。そんな社会の実現をサポートする次世代モビリティを開発したいと願い、対話可能な自動運転車椅子”パートナー・モビリティ”の研究開発に邁進してきました。
すでに福岡モーターショーや久留米商店街、病院施設などで実証試験を実施しており、多くの課題が見えています。今後は、限定されたエリア内での3-5年後の社会実装を目指し、より安定した自動運転システム、対話の判断ミスを減らす自然言語処理エンジン、認識精度の高い人工知能などの強化を進めます。また、街中にセンサーを配し、IoTで自動運転をサポートする都市デザインの研究、ユーザーの健康状態や行動を見守るシステムや移乗システムの開発にも着手したいと考えています。我々のモビリティは自宅、病院、美術館、テーマパーク、空港、職場、大学、被災地など適用範囲は多岐に渡ります。被災地で苦労されている高齢者や空港で困っている外国人観光客など、多くの方の役に立つモビリティにしたいと考えています。
自動運転といえば自動車が注目されがちですが、生活に密接に関わるモビリティとして車椅子は大きな可能性を秘めていると思います。この”パートナー・モビリティ”の活用を通じて、社会に貢献できればと思います。先進モビリティ技術ですべての人が笑顔で暮らせる社会を実現したい。まずは地元の久留米、福岡から実証試験とシステムの改良を進めます。その後、全国へも試験範囲を広げていき、新しい社会福祉の仕組み、新しいライフスタイルを提案していきたいですね。

東 大輔教授
名古屋大学大学院 工学研究科 航空宇宙工学専攻において、デルタ翼における前縁回転・後縁ジェットを用いた高揚力装置に関する研究で博士号を取得。その後、三菱自動車工業株式会社に入社し、開発本部スジオ・パッケージング技術部でスポーツカーやレース車両の空力デザイン開発に従事。2007年に久留米工業大学大学院自動車システム工学専攻講師、2010年 同准教授、2014年 同教授、2016年よりインテリジェント・モビリティ研究所 所長。交通機械工学科学科長を務める。
その他、自動車技術会 流体技術部門委員や日本航空宇宙学会 西部支部幹事などの学会活動。日本カーデザイン大賞選考委員、JAFAカーオブザイヤー選考委員、自動車殿堂会員。さらに九州大学大学院と名古屋市立大学の非常勤講師も勤める。専門は航空機と自動車の空力デザイン、自動運転モビリティの開発。