屋内、人混みの中、車道、歩道など様々な環境下で、自律移動ロボットの研究を行なっておられる産業技術総合研究所の佐々木様、新島様。研究の一環で、WHILL Model CRを利用しておられます。その背景や、今後の取り組みについてお話を伺いました。
佐々木 洋子様
国立研究開発法人産業技術総合研究所
人工知能研究センター

新島 駿様
国立研究開発法人産業技術総合研究所
人工知能研究センター
1. 研究内容
佐々木:産業技術総合研究所では幅広い分野における総合的な技術開発を行っており、私たちのチームでは、人と生活空間を共有できる自律移動ロボットの研究を行なっています。
一例として、人混みの中でロボットが自律移動するためにはどうすればいいか?といったテーマがあります。人混みの中では多くの人が存在し、またそれぞれが動いている環境なので、単純に障害物を避ける動きをするだけでは自律移動することが難しいです。実際に通行する人の一人一人の経路データを収集し、人が多く通行する箇所、人がよく立ち止まる箇所などの情報を分析し、ロボットの移動ルートに反映するなど、自然な走行を実現するにはどうすればいいか、試行錯誤しています。
例えばこのような、人との関わりの中でのロボットの自律移動について研究を行なっています。

2. WHILL Model CR導入の背景
佐々木:今回の研究テーマとして、自律移動ロボットの中でも、屋外での研究を行いたいという背景がありました。屋内の車輪ロボット、屋外で車両を使った研究はそれぞれ進めていたのですが、特に屋外歩道環境を中心に建物内も含む広範囲を扱う実験プラットフォームとして電動車椅子を導入したいと考えました。
新島:屋外、かつ歩道領域となった際に、まずModel CRのハードウェアの使用を検討しました。以前から、佐々木も私もWHILLを知っていたのですが、人が乗ることができ、電動車椅子のため交通ルール上問題なく歩道領域を走行できるので、自然とModel CRを利用しようと思いました。
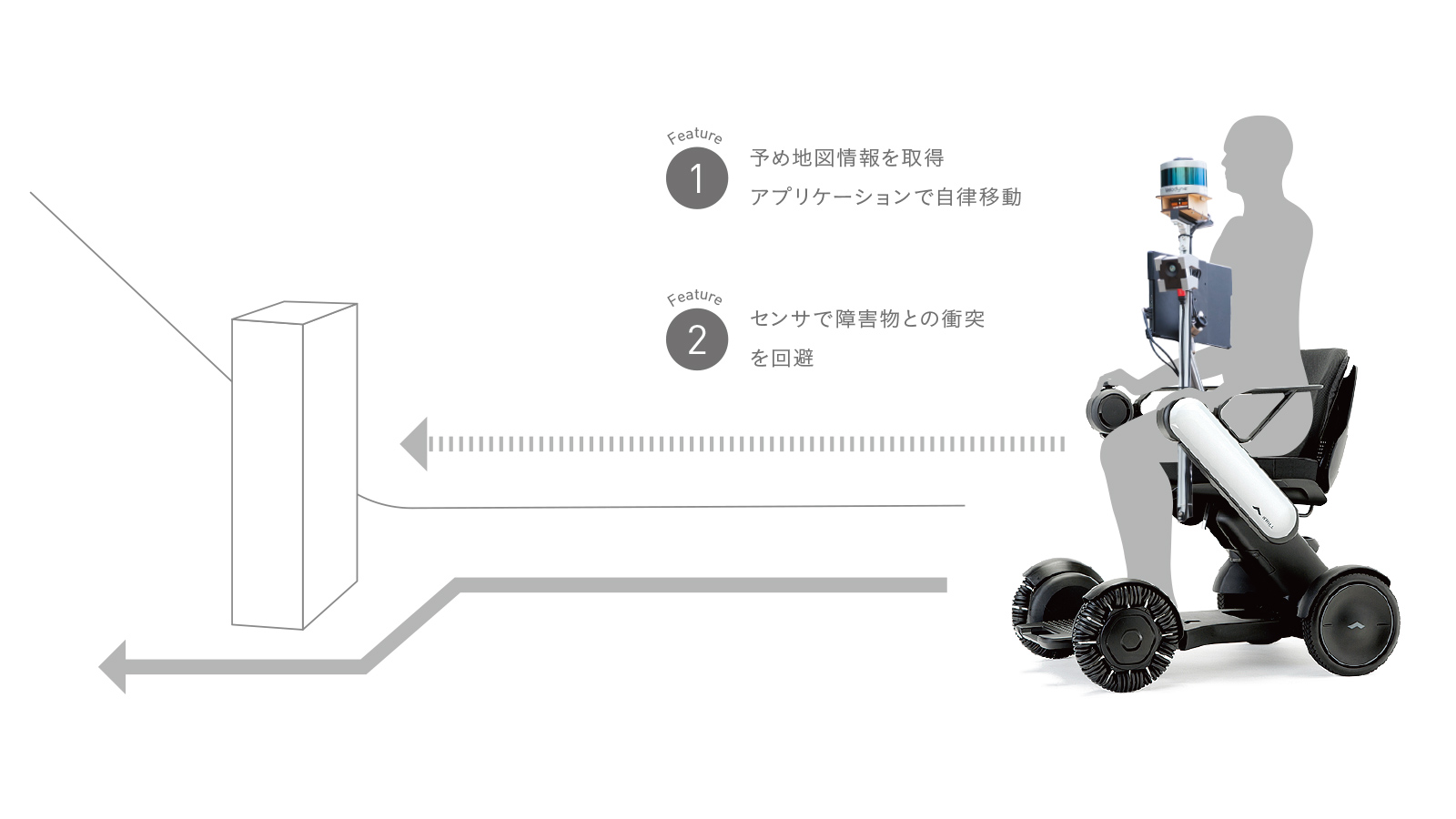
新島:実際の手法としては、事前に自律移動を行いたいエリアの3次元地図の情報を取得します。その情報から2次元地図を作成し、3次元・2次元両方の地図情報をアプリケーションに入力します。
その上で、実際にModel CRを自律走行させます。自律走行時は、3次元地図とLiDAR*および6軸IMU**の2種類のセンサーから得た情報を用いて自己位置推定を行い、2次元地図とLiDARから得た情報を用いて経路計画・動作生成を行っています。また、人など動いているものを避けるために、LiDARから得た情報を2次元地図に随時反映しています。
人混みなど、動いているものが多い場所では、衝突を避けるためにリアルタイムでModel CRを制御する必要がありますが、データ量が多すぎるとアプリケーションの計算が追いつかなくなり、実現できません。そのため、3次元・2次元両方の地図情報を効率よく使用し、計算コストをおさえる工夫をしています。
*LiDAR:レーザー光を用いて距離を測れるセンサー
**6軸IMU:6つの軸で角度・加速度を取得できるセンサー

3. WHILL Model CRのメリット
佐々木:まずは、人が乗車することができる点ですね。このような実験用のハードウェアで人が乗車できるものは多くありません。状況により人が乗車している状態、無人での状態を使い分けることができます。また、屋外でも安定して走行できる走破性があり、速度も時速6kmと十分に出る点が良いと思います。価格も、一般的な実験用のハードウェアと比較すると非常に安価ですね。

4. 今後の展望
佐々木:現在われわれが行なっている研究は、人が生活している中で自律移動をするという「機能」の開発です。この機能を活用できる場面は、数多くあると考えています。
例えば、屋内外における配送ロボットや、ショッピングモールなど施設内を案内、掃除、警備するロボットが挙げられます。他にも、ショッピングカートやベビーカーなど、施設で使用した後に返却する必要のある製品にも活用することができます。
現在は実証実験段階ですが、既に企業との共同研究も行なっています。5年くらい先には、こういった光景が当たり前のものになっていれば嬉しいですね。
佐々木 洋子様
国立研究開発法人産業技術総合研究所人工知能研究センター人間情報研究部門所属 主任研究員。
新島 駿様
国立研究開発法人産業技術総合研究所人工知能研究センター人間情報研究部門所属、および東京理科大学大学院 理工学研究科 機械工学専攻 博士課程。日本学術振興会 特別研究員(DC1)。
| <研究開発モデルModel CRについてもっと知りたい!と思った方は>
こちらから詳しい製品情報についてご覧になれます。 |