More features
一人一人に寄り添う機能をプラス
WHILL Model Cは、より安全に便利に使っていただくための様々な機能を搭載しています。
スマートフォンなどの電子デバイスをご利用の方に便利なUSBポート。
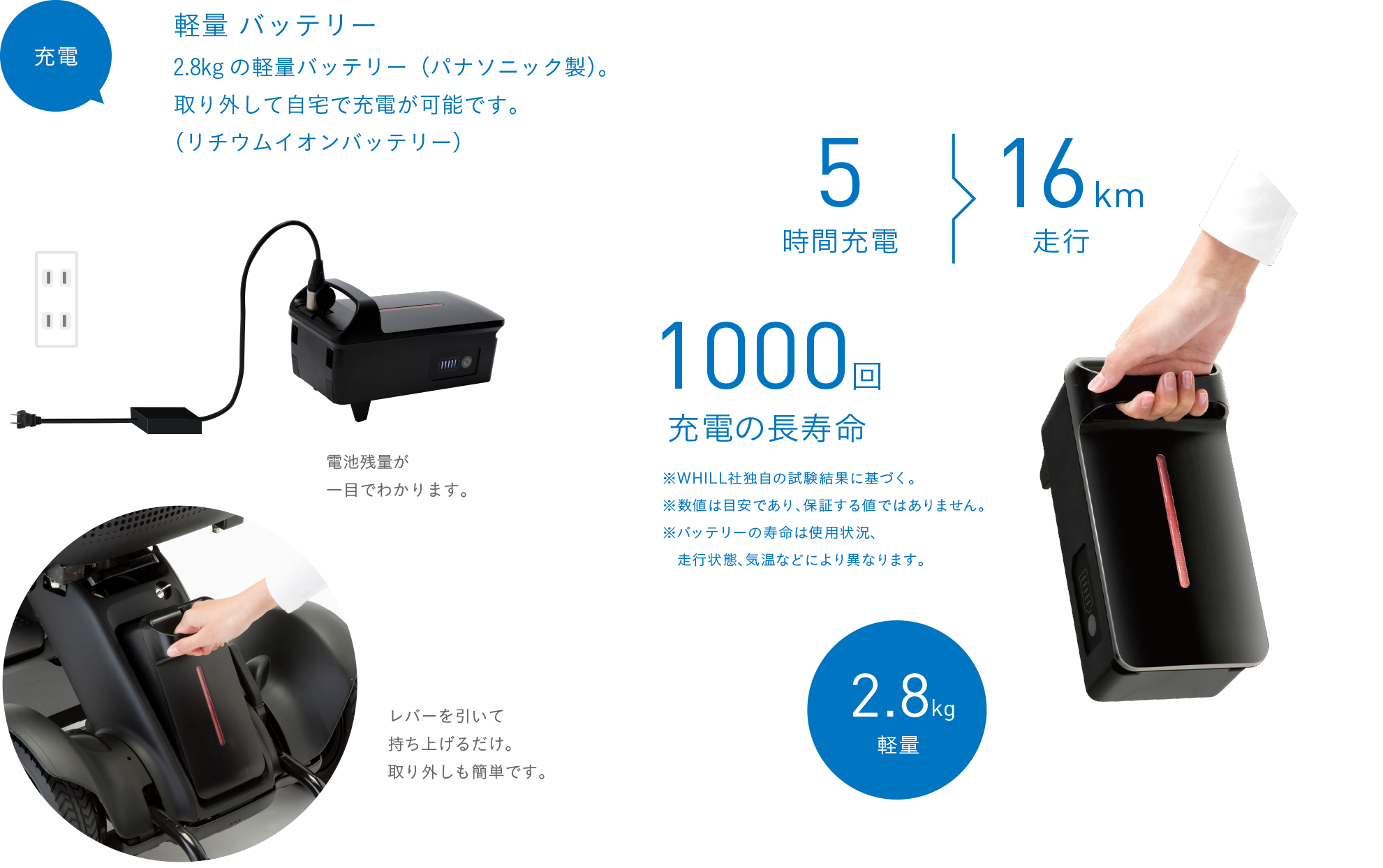
取り外し可能な軽量バッテリーは充電場所を選びません。
また、安全な走行のために、急な上り坂などを感知する音声案内機能や簡単操作のワイヤレスキーも搭載しました。



安心の音声案内機能
急な坂道の走行など危険な走行に対して、
自動音声が流れます。


スマートキー
ワイヤレスで鍵をかけることができます。
(本体付属)